
Im Dezember 2021 startete Pitchbrother Tobias sein neues Projekt „Chinook“.
Der Rumpfbausatz der Firma VARIO wird zusammen mit der speziell für diese Modell entwickelten Mechanik ausgeliefert. Der Antrieb ist elektrisch.
Der Erstflug der selbsttragenden Mechanik war im Juni 2022. Bereits im Oktober 2022 fand dann der der erste Flug mit der Mechanik im „nackten“ Rumpf statt, nachdem alle Spannten eingeklebt wurden.
Bis zur finalen Fertigstellung einschließlich der Lackierung dauerte es dann noch mal bis Ende 2024. Nun ist das Modell fertig und wird mit Sicherheit in der Flugsaison 2025 dem Piloten viel Spaß bereiten.
Hier der erste Teil des Bauberichtes:
Aufbau der Mechanik und
Einbau der Mechanik in den Rumpf
=> zweiten Teil teil des Bauberichtes <=

Als erstes wird mit dem Bau der Mechanik begonnen. Die selbsttragende Mechanik des Chinook ist nach dem Zusammenbau bereits flugfähig. So könnten erste Testflüge auch ohne Rumpf durchgeführt werden.

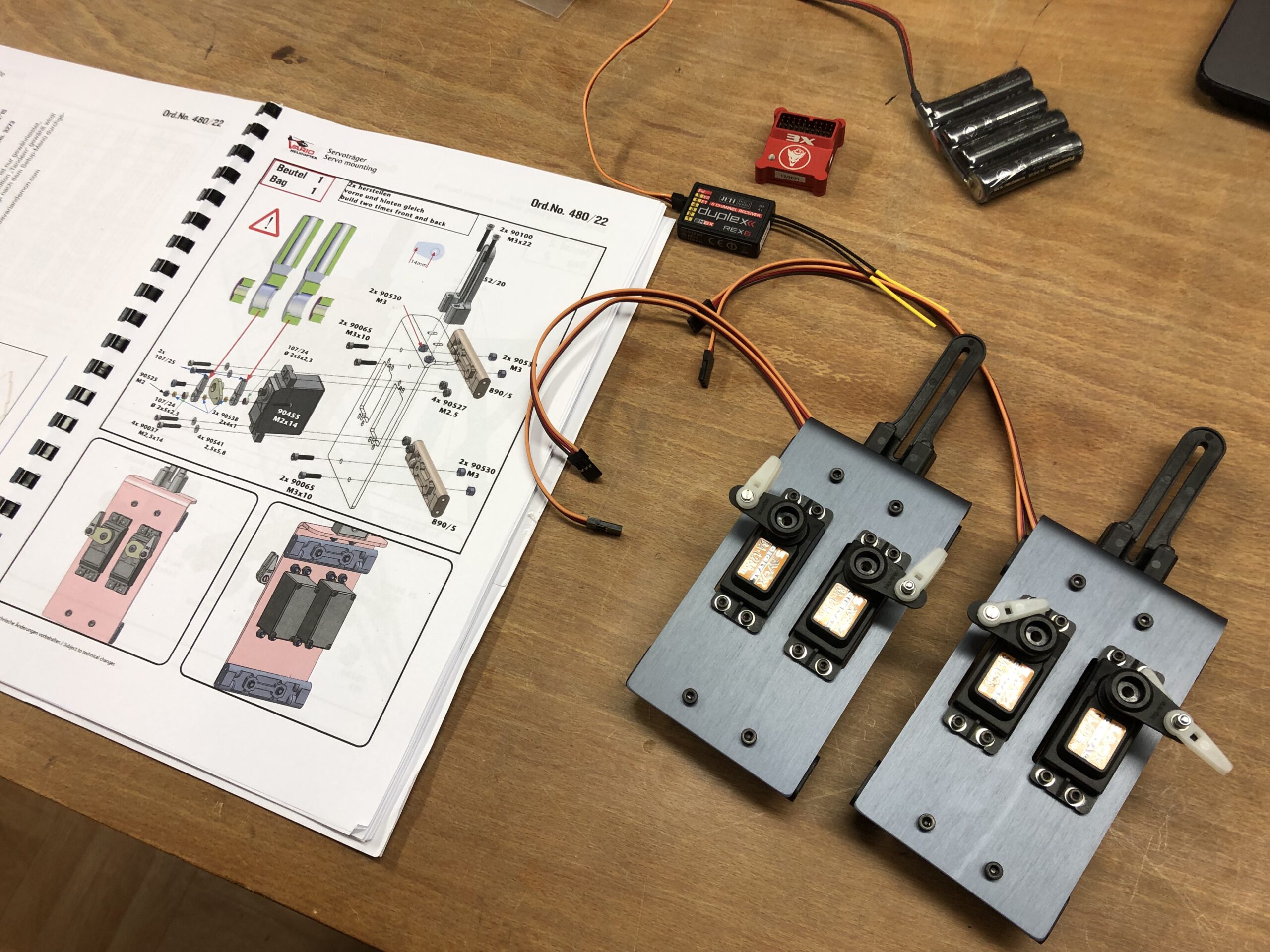
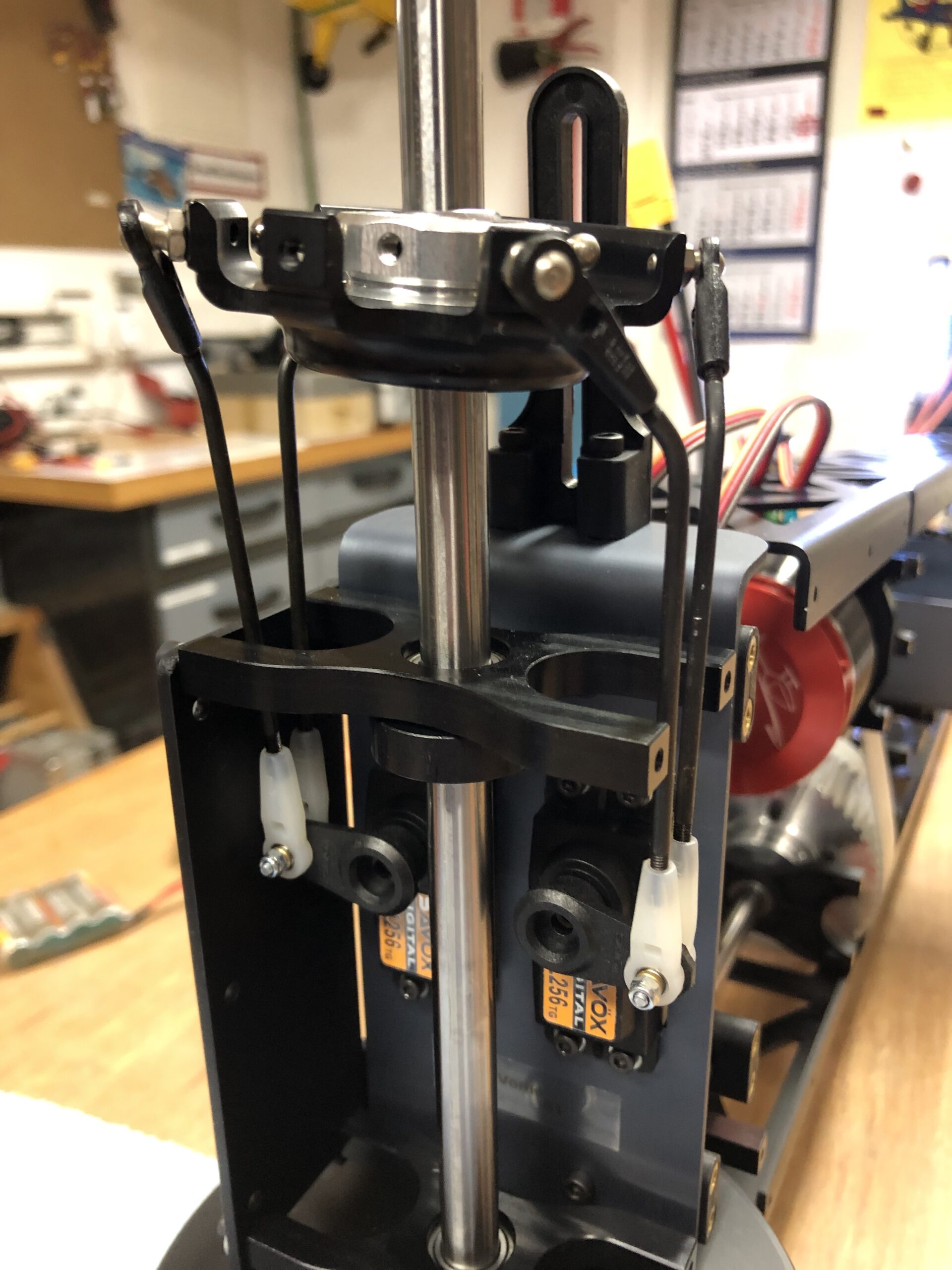
Begonnen wurde mit dem Aufbau der Servohalter. Für den Chinook verwende ich die Servos SAVÖX SA-1256TG, mit denen ich in meinen anderen Scalemodellen bereits gute Erfahrungen gesammelt habe. Das Modell kommt mit je zwei Servos pro Taumelscheibe aus.
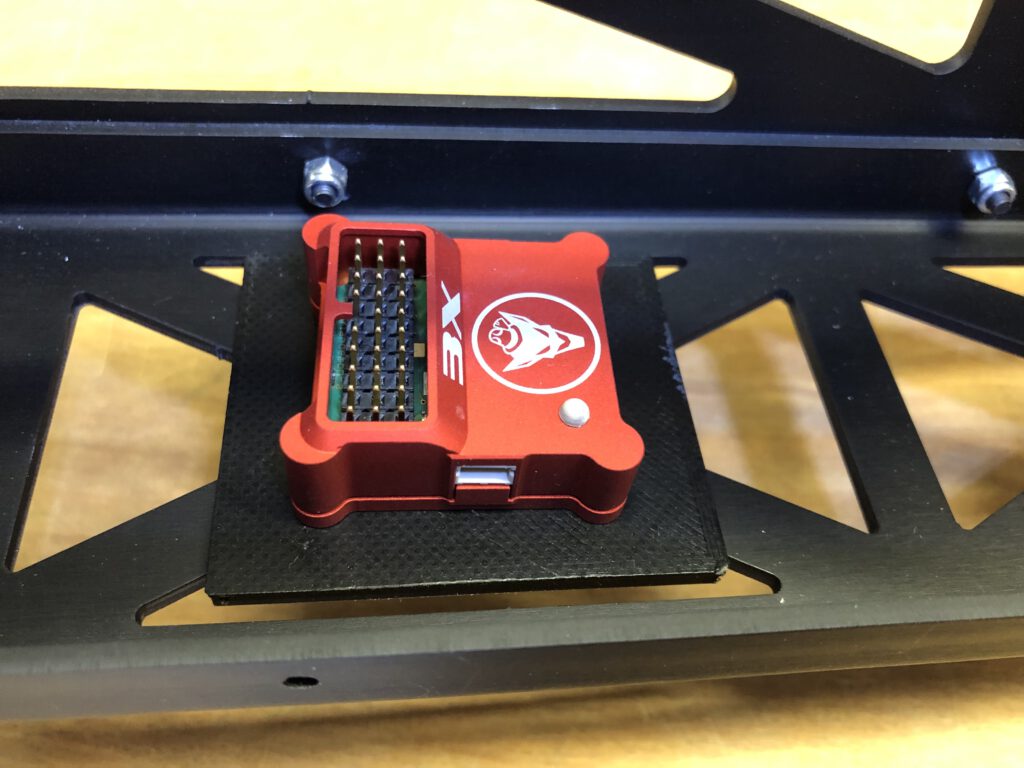
Als nächstes wurde das Kreiselsystem „BavarianDEMON 3X“ zur Ansteuerung der vier Servos gemäß des in der 3X Anleitung separat beschriebenen Tandem-Mischers eingestellt.
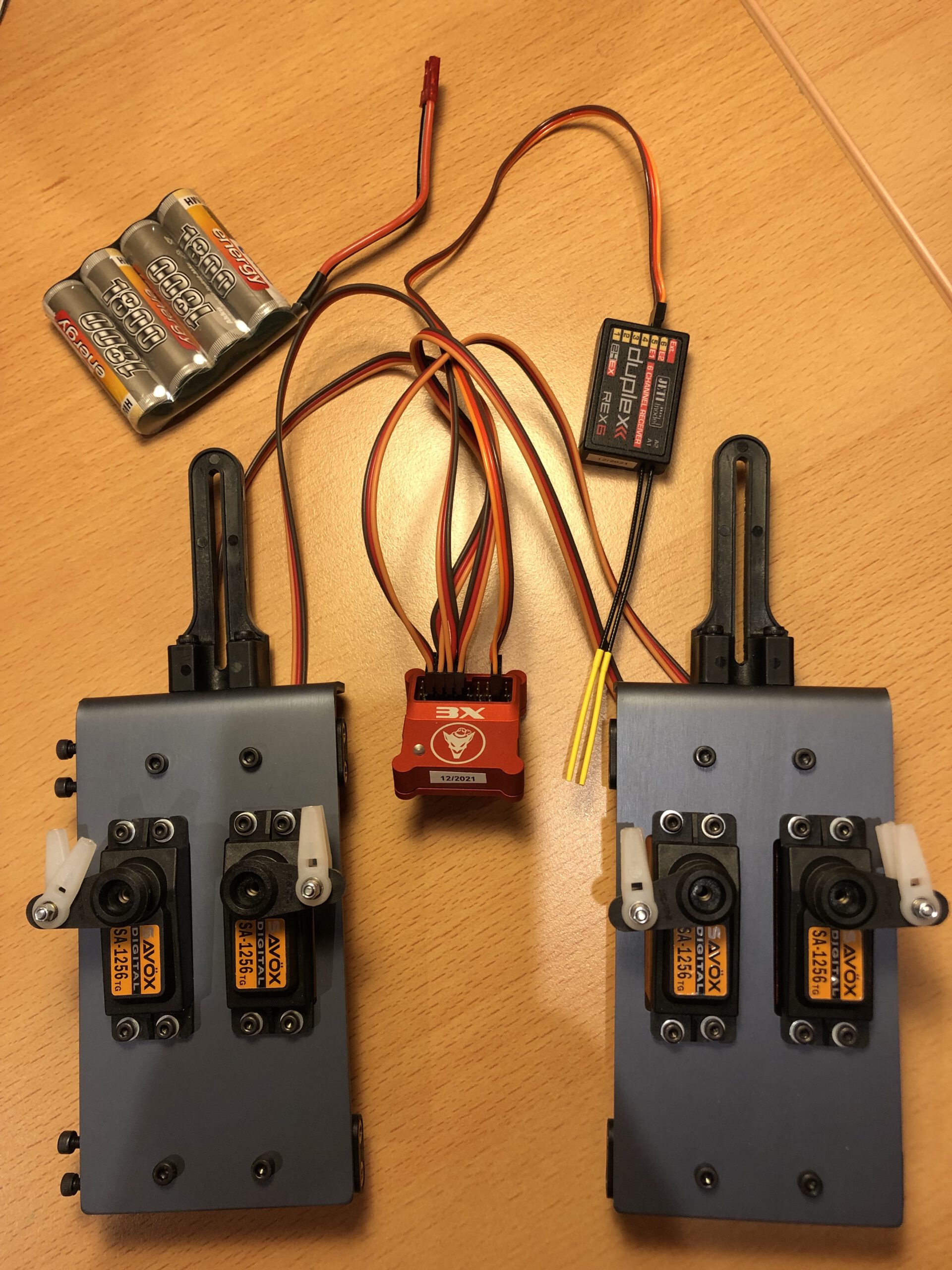
Der 3X wird mit nur einem Servokabel mit dem Empfänger Jeti DUPLEX REX 6 verbunden.
Über das Summensignal werden so alle am 3X angeschlossenen Servos gesteuert.
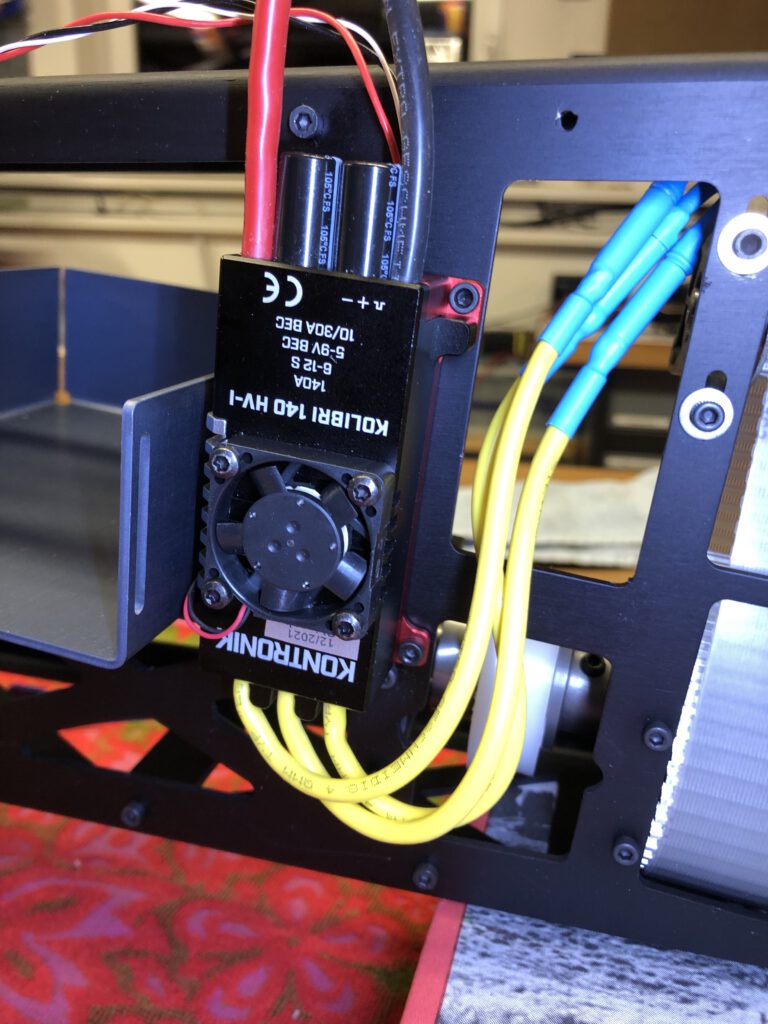
Auch der Motorregler KONTRONIK 140 HV-I bekommt so sein Signal. Der Telemetrieanschluss des Reglers geht in einen speziell konfigurierten Eingang am Empfänger.
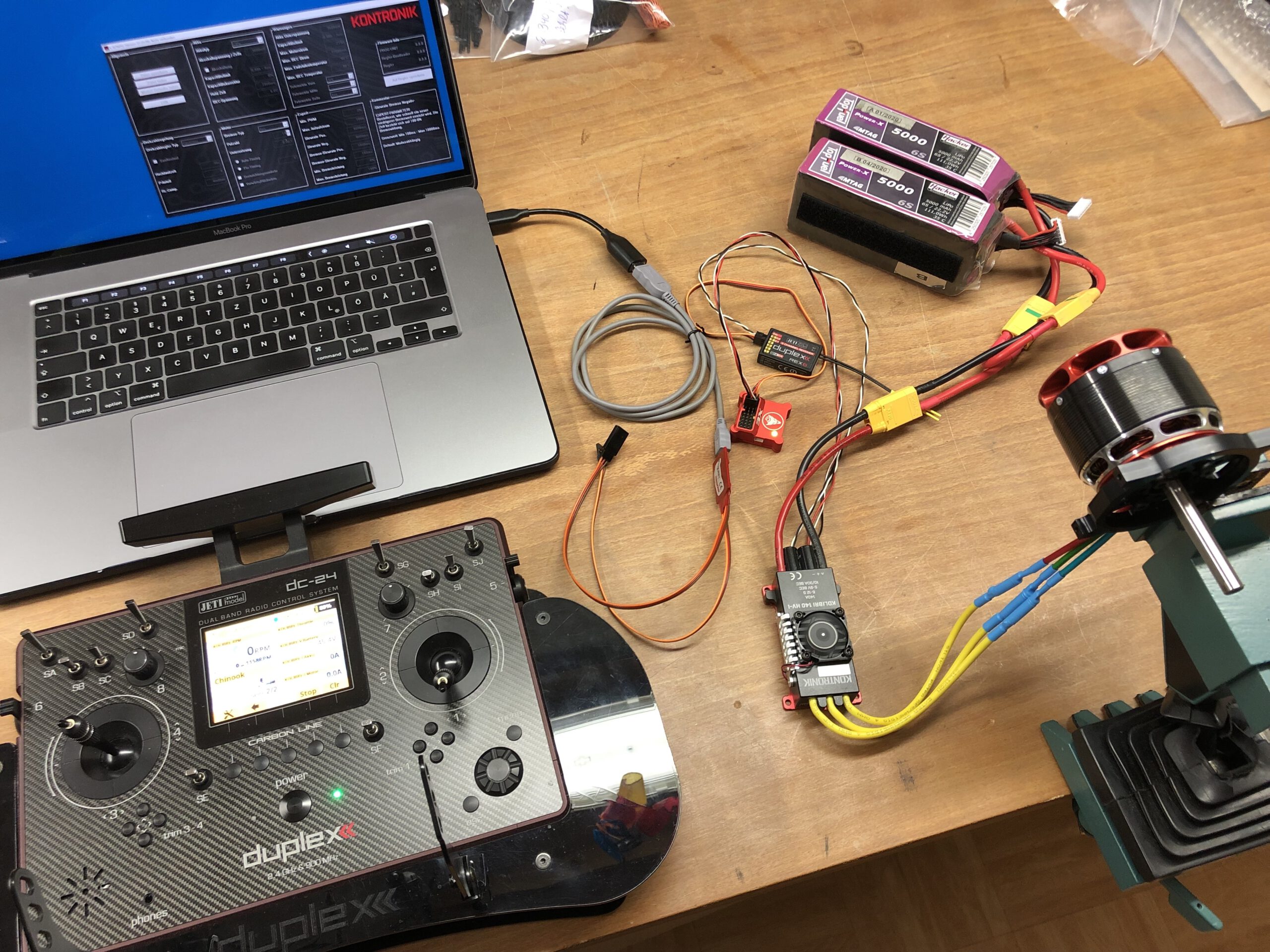
Der Motor KONTRONIK PYRO 850-24 L hat eine Leistung von 3,5 kW und 235 U/min/V. Die Maximaldrehzahl des 575g schweren Kraftpakets liegt bei 25.000 U/min.
Auf den Fotos zu sehen sind auch die zwei 6s Antriebsakkus HACKER TopFuel LiPo 35C Power-X 5000mAh die in Reihe geschaltet werden. Es stehen für den Antrieb somit 44,4 Volt mit 222,0 Wh zur Verfügung.
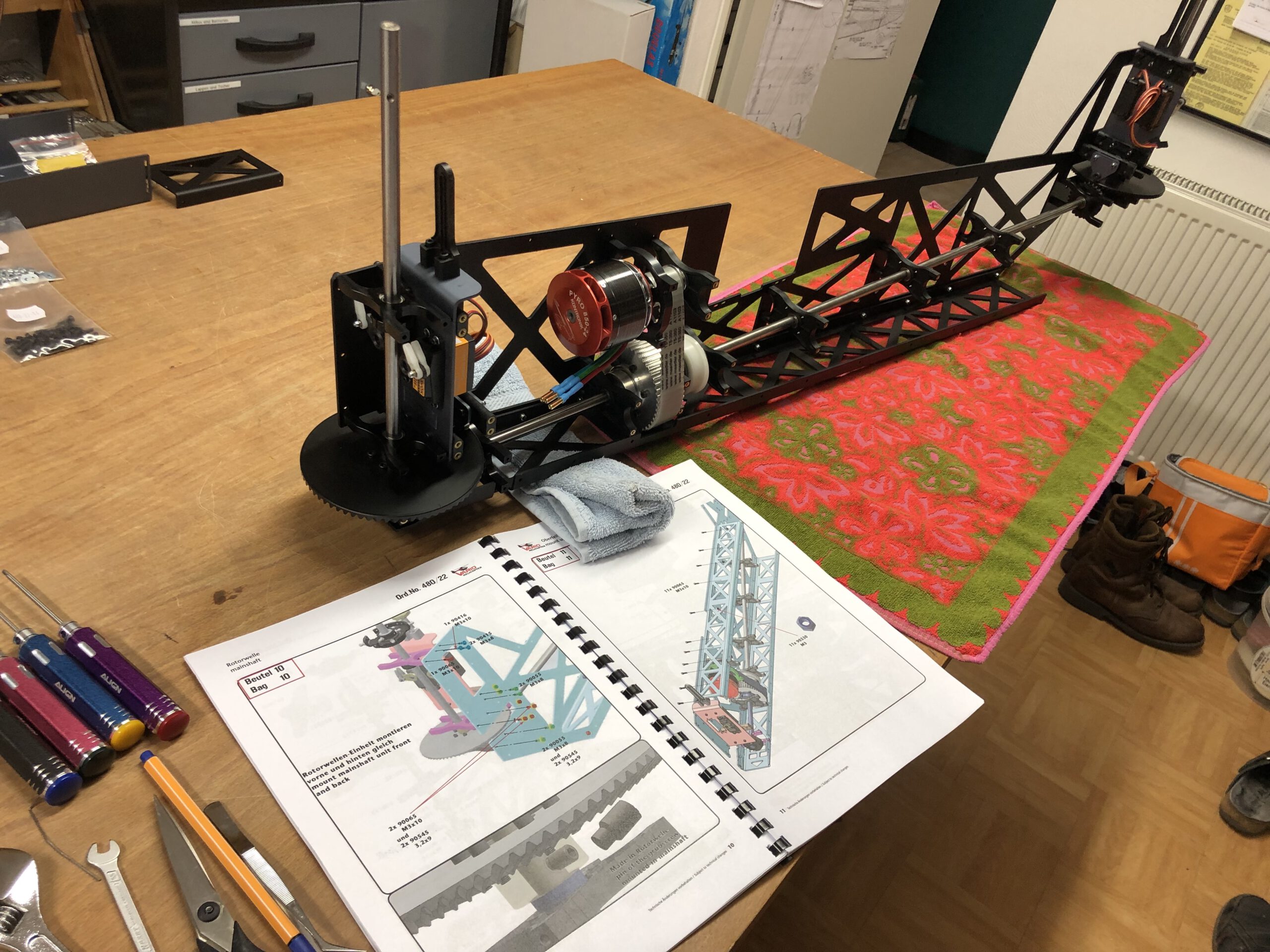
Erster Zusammenbau der Mechanik mit den beiden Rotorwellen vorne und hinten. Über große Tellerzahnräder werden die Rotorwellen mit dem Antriebsstrang verbunden.
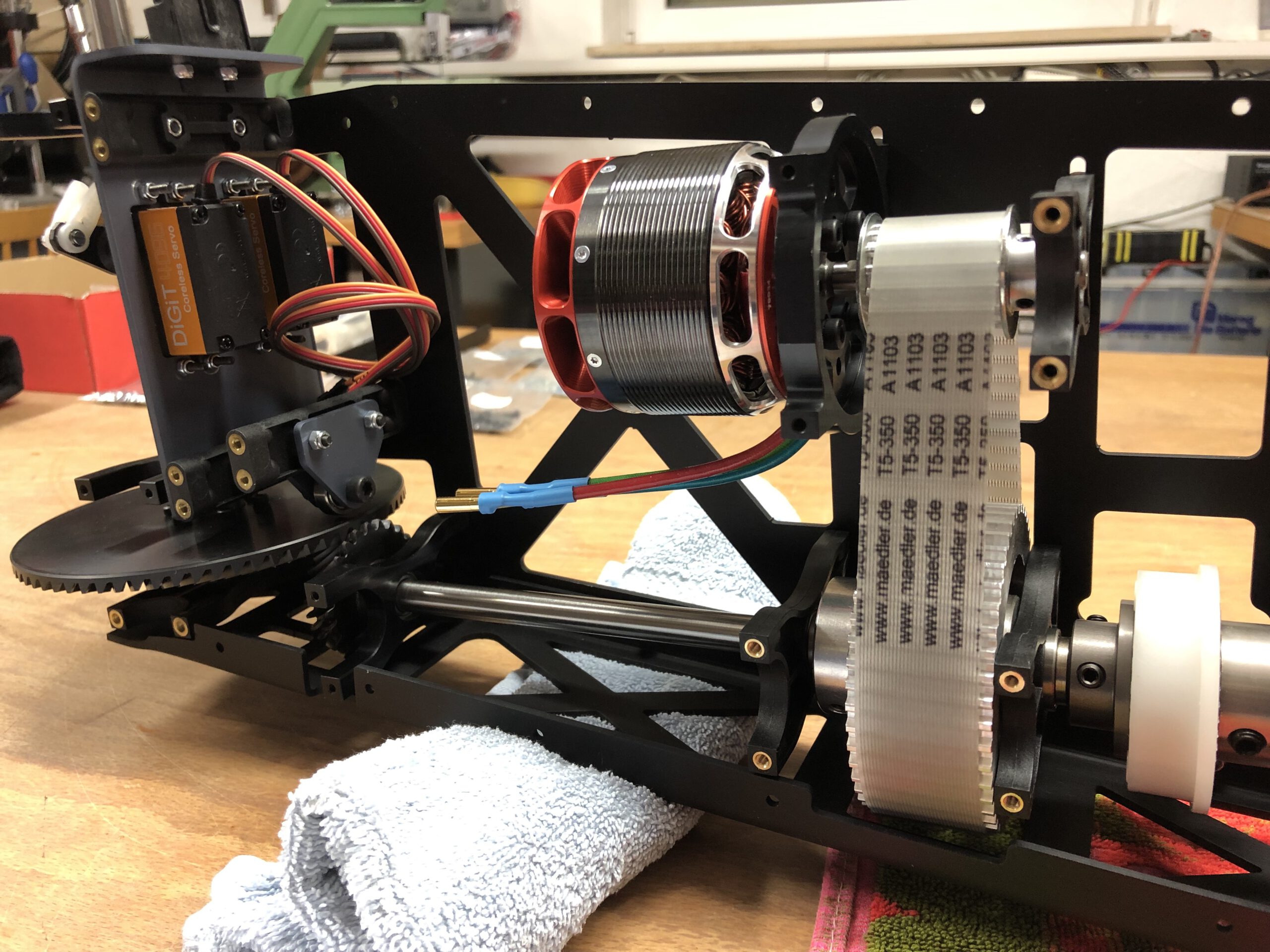
Der Motor treibt über einen breiten Zahnriemen das Hauptzahnrad der Antriebswelle an. In dem großen Zahnrad befindet sich auch der Freilauf. So können bei stehendem Motor die Rotoren weiter drehen.
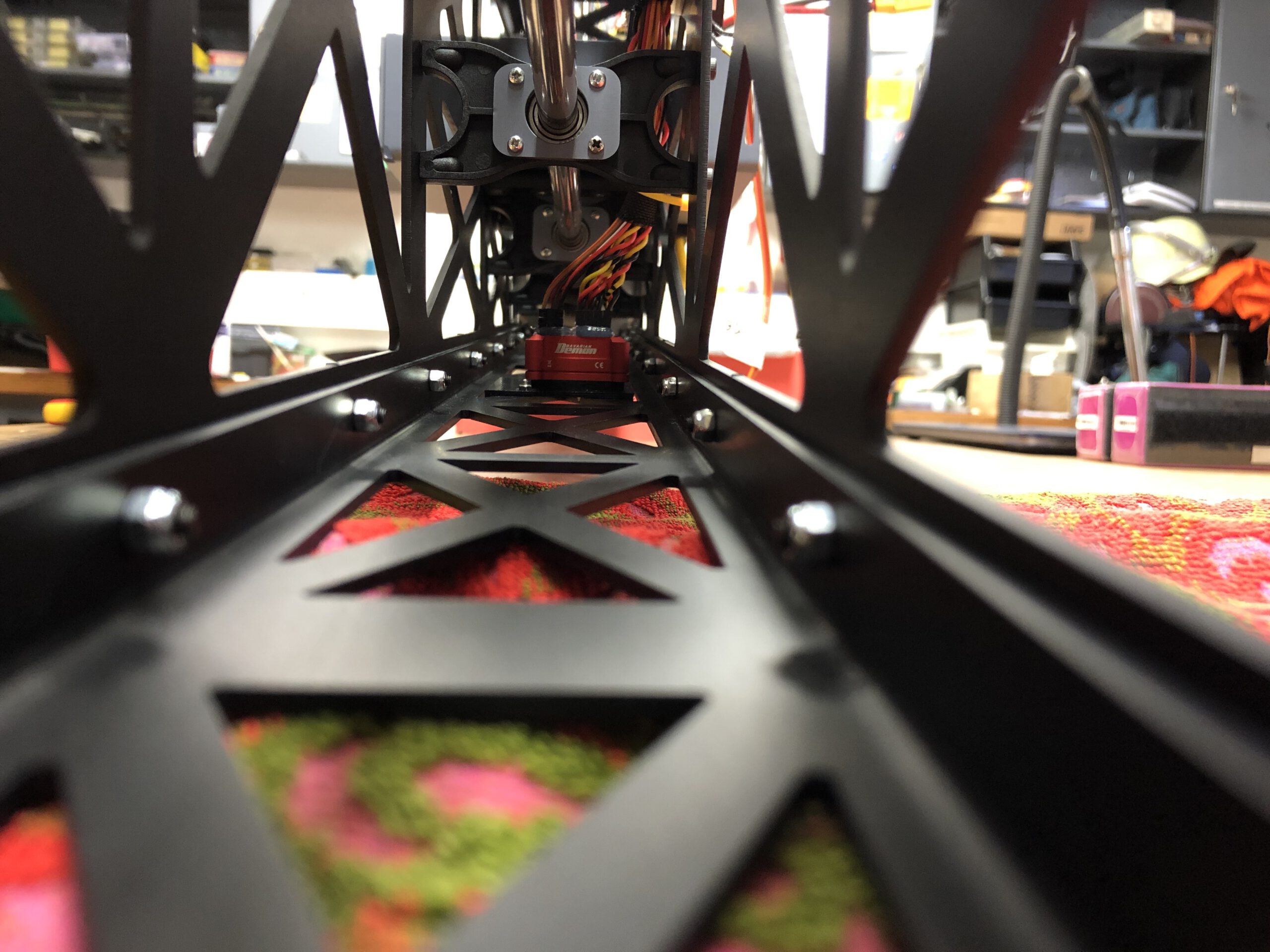
Das Kreiselsystem findet seinen Platz am Boden in der Mitte der Mechanik. Hierfür wurde eine Kunststoffauflage gedruckt, damit der 3X richtig aufgeklebt werden kann.
Für die Platzierung der Elektronikkomponenten werden seitens VARIO keine Empfehlungen gegeben. Somit habe ich für den Motorregler einen Platz direkt neben dem Akkufach ausgesucht. Zur Befestigung habe ich M3 Gewinde in das Seitenteil der Mechanik geschnitten.



Parallel zum Aufbau der Mechanik habe ich die beiden Taumelscheiben vorbereitet. Die Kugelbolzen werden vor der Montage mit Schraubensicherungslack versehen.
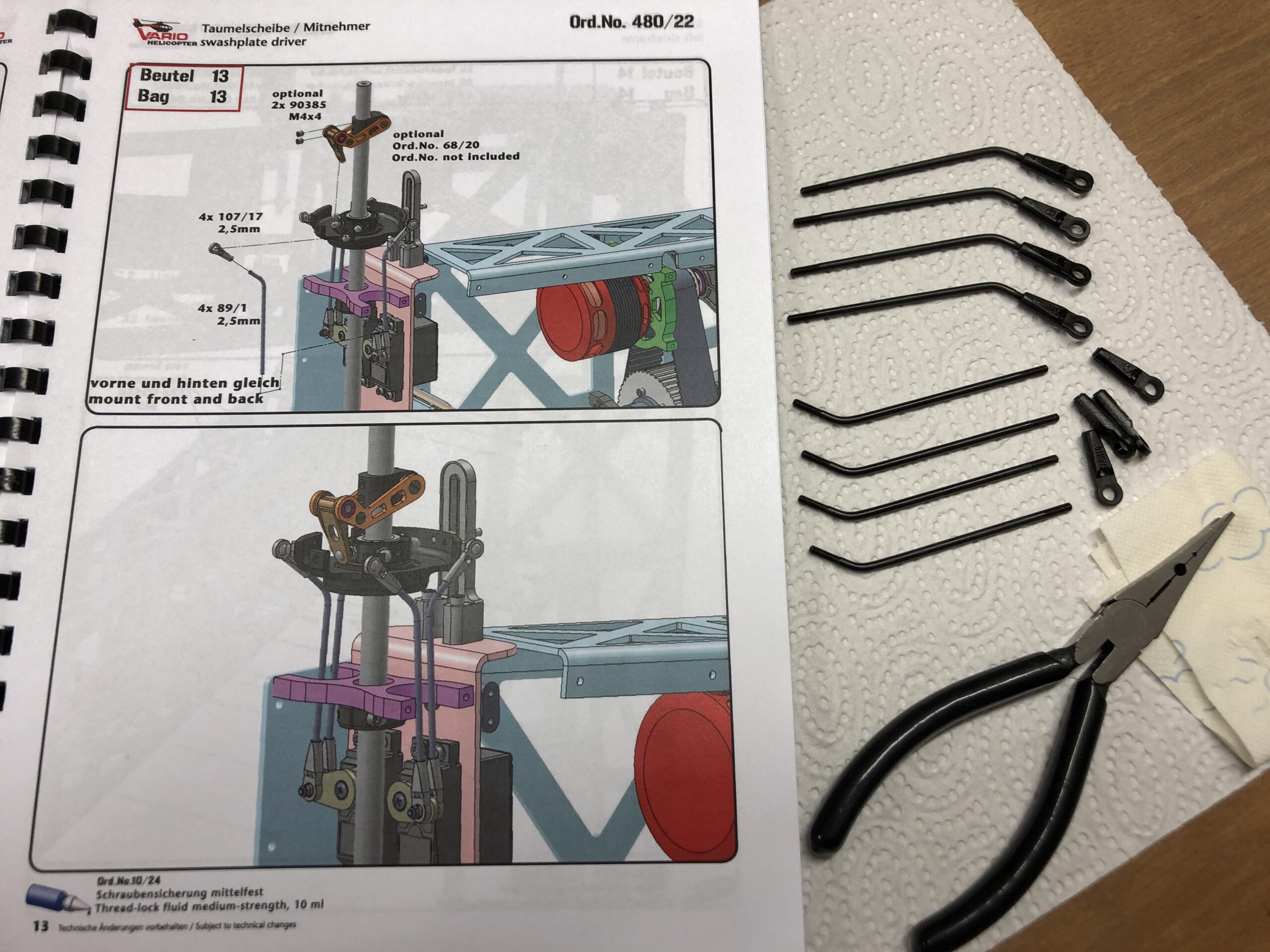
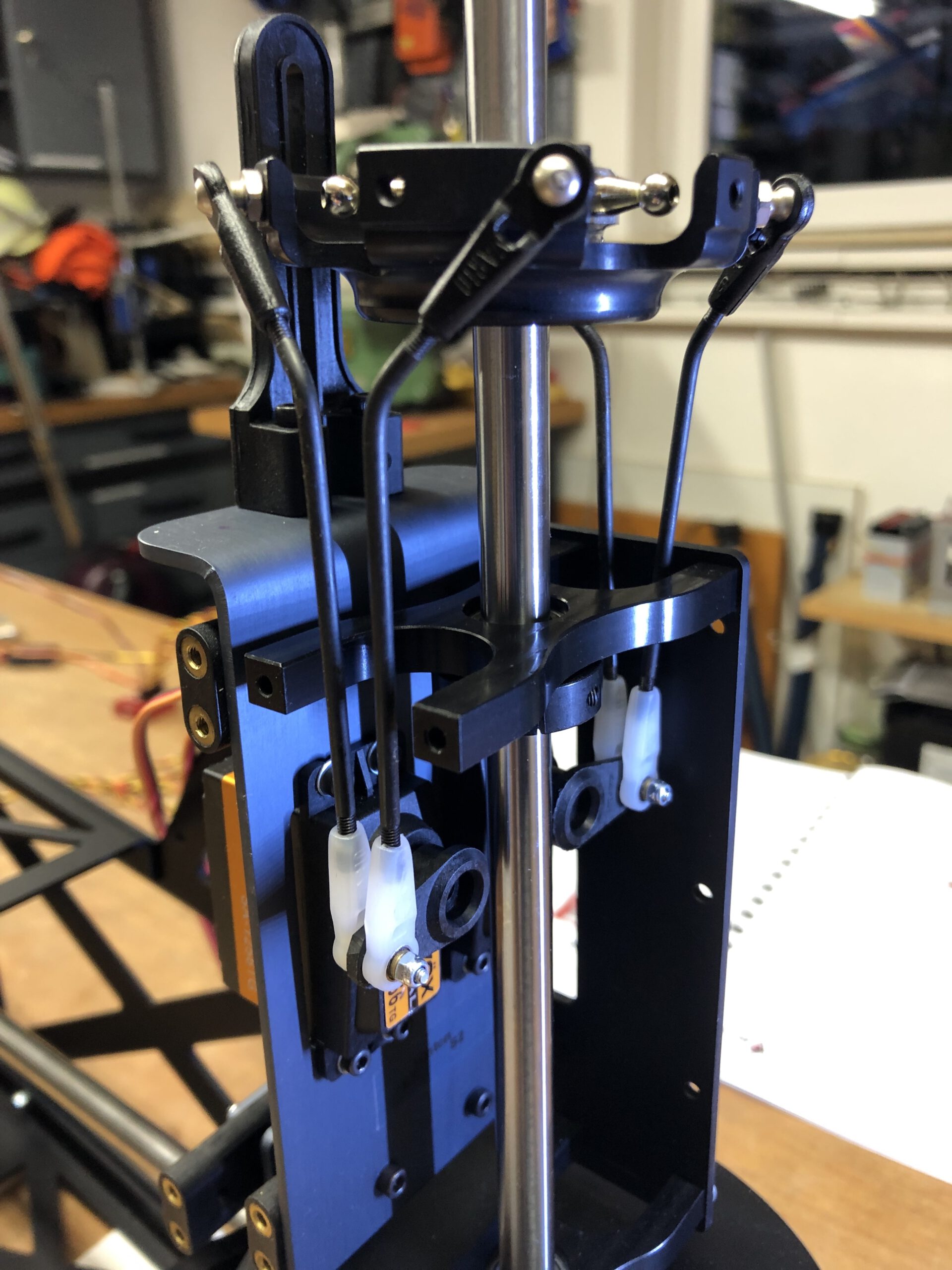
Die spezielle Anlenkung der Taumelscheibe. Es gibt nur die Funktion Roll und Pitch für die Taumelscheibe vorne und hinten.
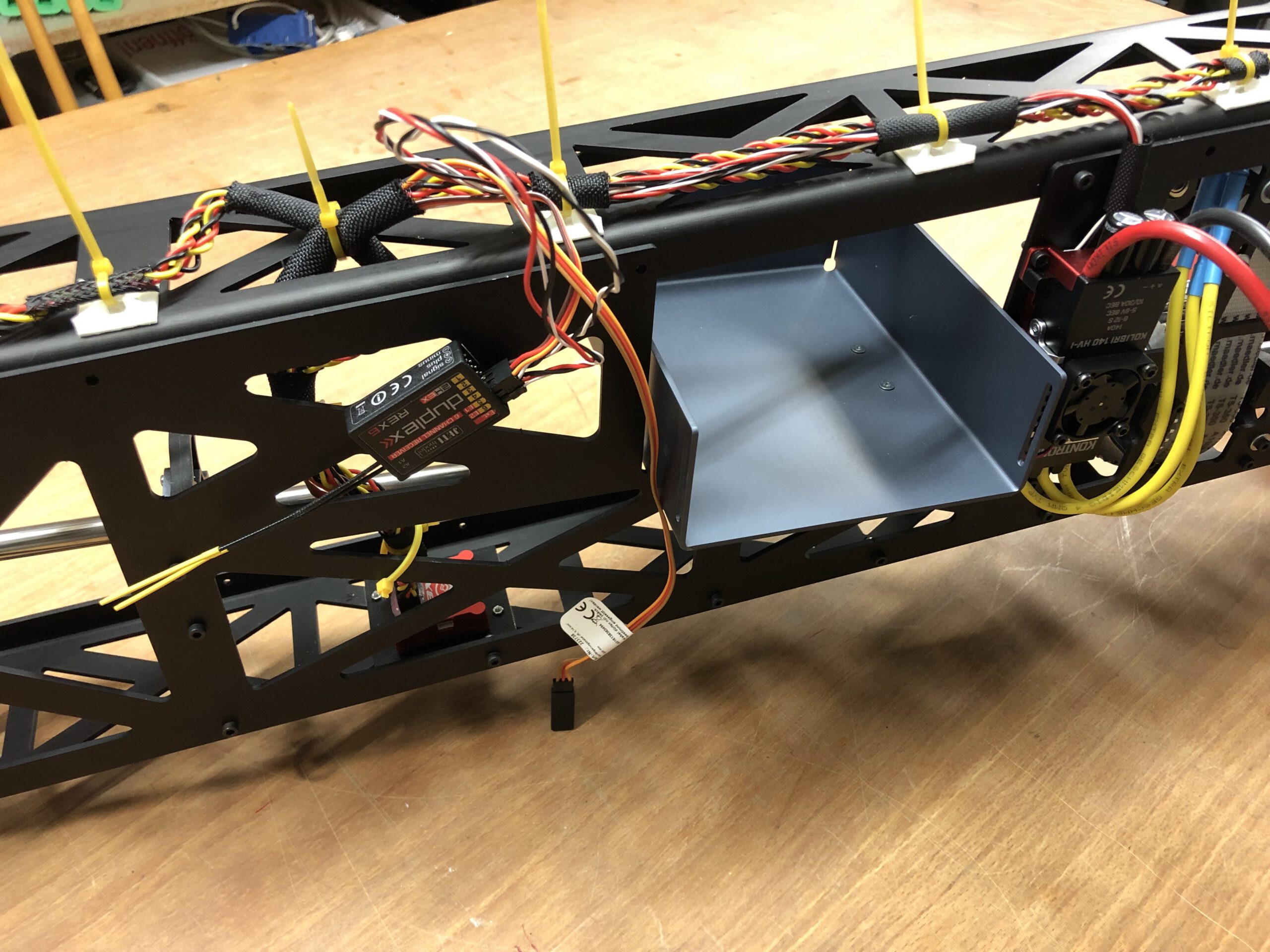
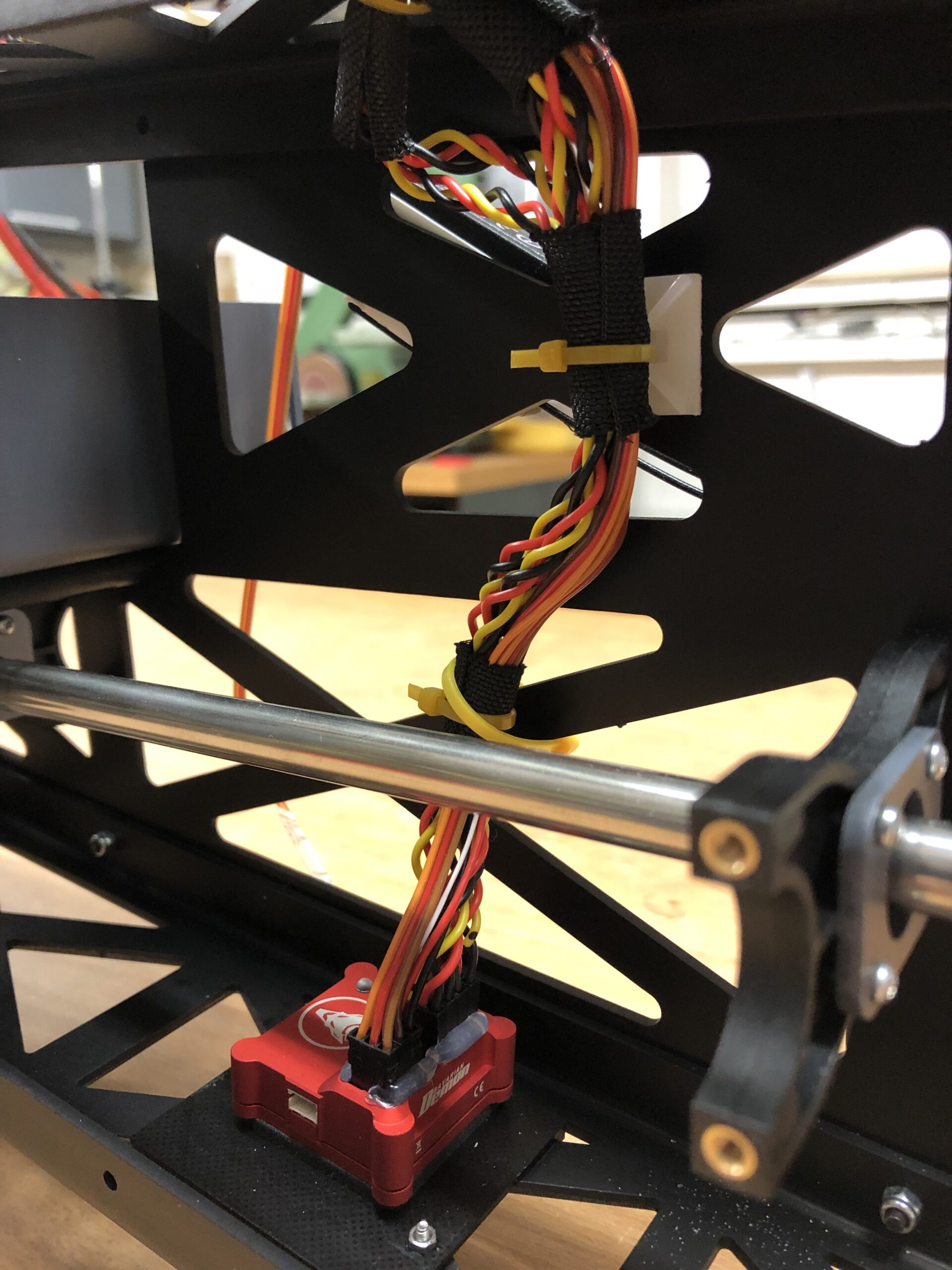
Der Kabelbaum ist fast fertig. Die Kabellängen zwischen Servos und 3X wurden angepasst und ordentlich verlegt. Auch die Kabelverbindungen zwischen Regler, Empfänger und 3X wurden verlegt.
Als nächstes kann dann das zweite Seitenteil der Mechanik angebracht werden.
Fehlen dann nur noch das Fahrwerk und die beiden Rotorköpfe, bevor der erste „Hüpfer“ gemacht werden kann.
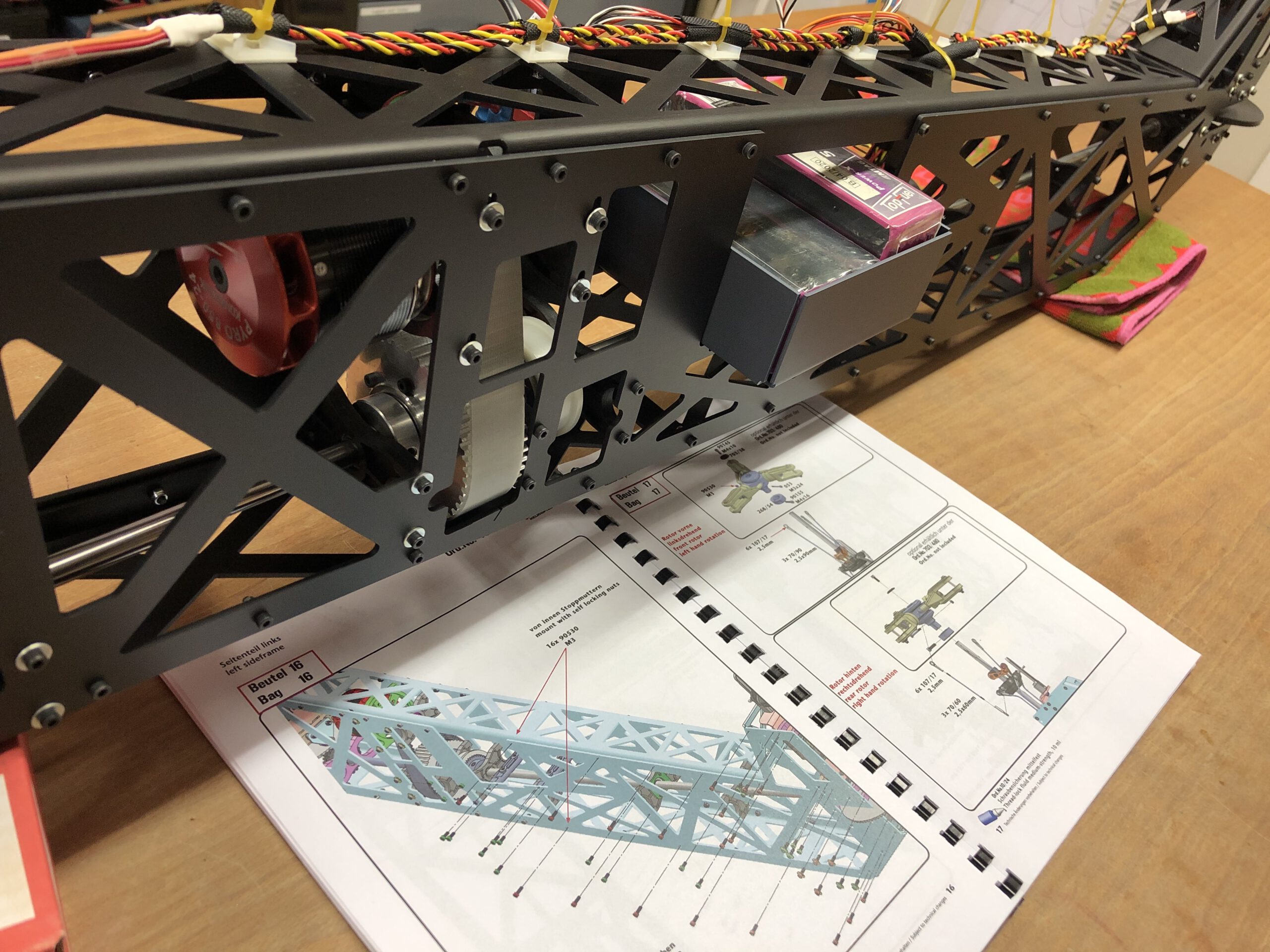
Das anbringen des zweiten Seitenteils war eine Strafarbeit. Gefühlt 100 Schrauben verschiedener Längen, teils mit Unterlegscheiben mussten angebracht werden. Ein Großteil der Schrauben wird von der Innenseite mit Stopmuttern gesichert.




Als nächstes muss ich mir etwas für die Befestigung der beiden Akkus einfallen lassen. Leider passen meine 6s5000er Hacker LiPo’s nicht flach nebeneinander in das Akkufach.
Eine kleine Odyssee mit dem Kreisel ….
Der 3X ist das aktuelle Modell der Firma Bavarian Demon. Der 3SX war ein Vorgängermodell, das es in den Modellbaushops auch nicht mehr zu kaufen gibt.

Nach zahllosen erfolglosen Einstellversuchen hatte ich dann nach der Kontaktaufnahme mit dem Kreiselhersteller die Information das der 3X für die Chinook nicht verwendet werden kann. Dies funktioniert nur mit dem „alten“ Vorgänger! Glücklicherweise war in meiner EC145 ein 3SX verbaut, den ich gegen den eigentlich für die Chinook gekauften 3X tauschen konnte.
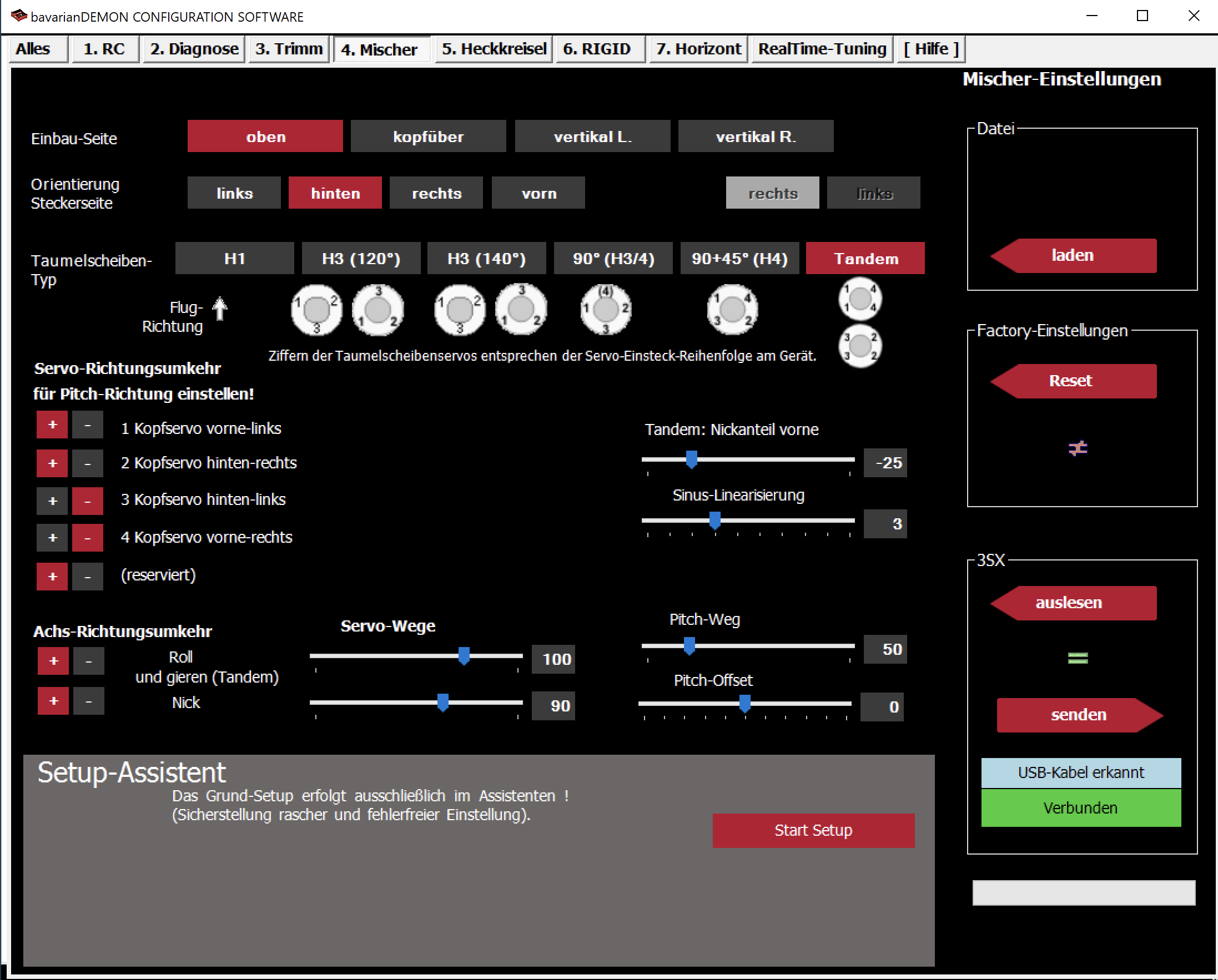
Nach dem Kreiseltausch funktionierte das spezielle Tandem-Setup immer noch nicht. Nach erneuter Rücksprache mit dem sehr schnellen und freundlichen Service von Bavarian Demon hatte ich dann noch ein Firmwareupdate durchgeführt. Nun können alle Einstellungen des Tandems durchgeführt werden.
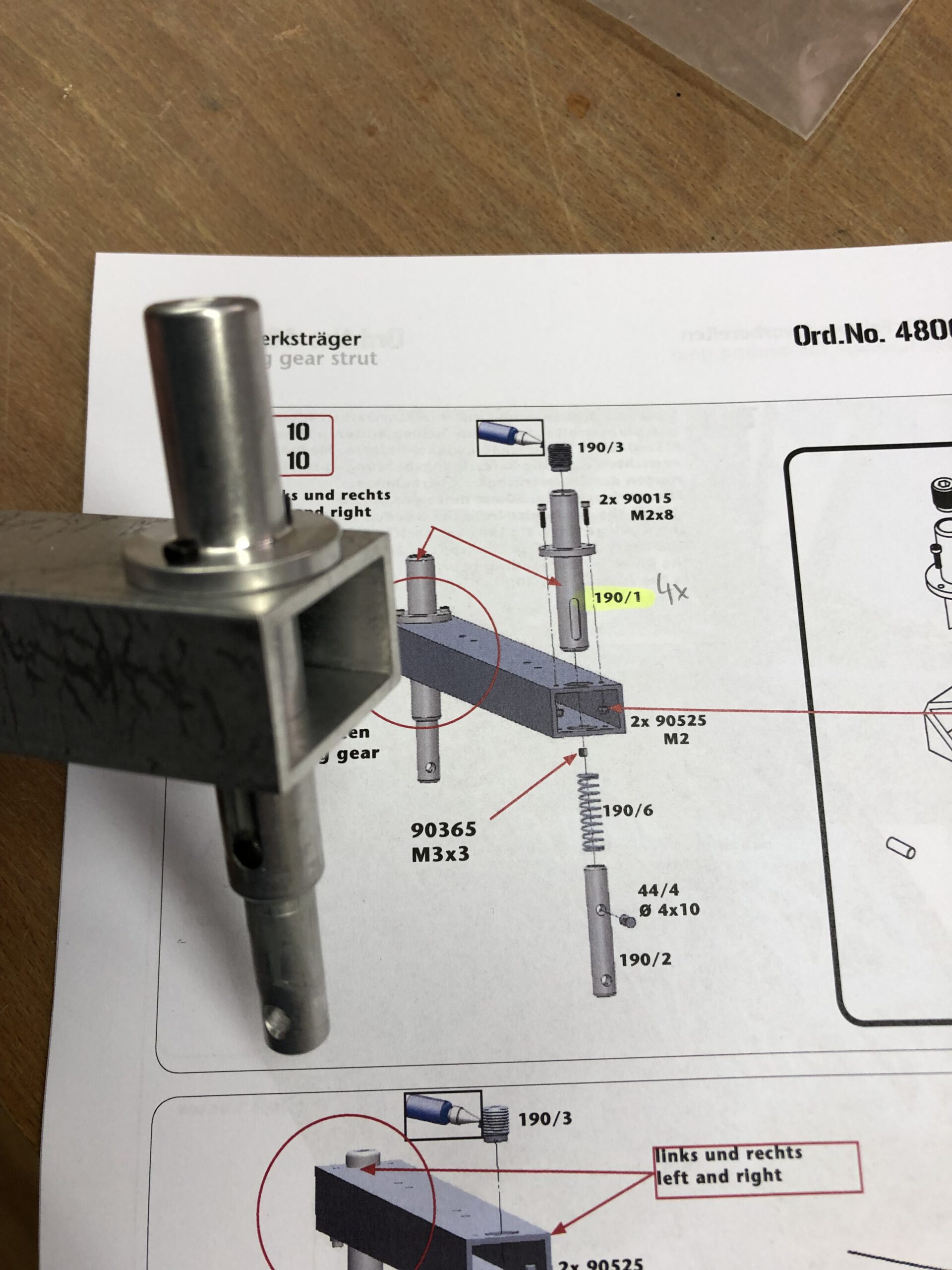

Vor dem Erstflug der selbsttragenden Mechanik musste natürlich noch das Fahrwerk installiert werden. Leider passten die Kolbenstangen nicht in die Zylinder. Diese wurden nach Reklamation ausgetauscht.
Eine weitere unerwartete Aufgabe für den erfahrenen Modellbauer war dann der Einbau Der Zylinder in die Querstreben. Finde den Fehler im Bild links 😉
Am 18. Juni 2022 war es dann soweit! Erstflug der Mechanik auf dem Modellfluggelände des FMC Dietzenbach.

Als nächstes wird der Rumpf für den Einbau der Mechanik vorbereitet.


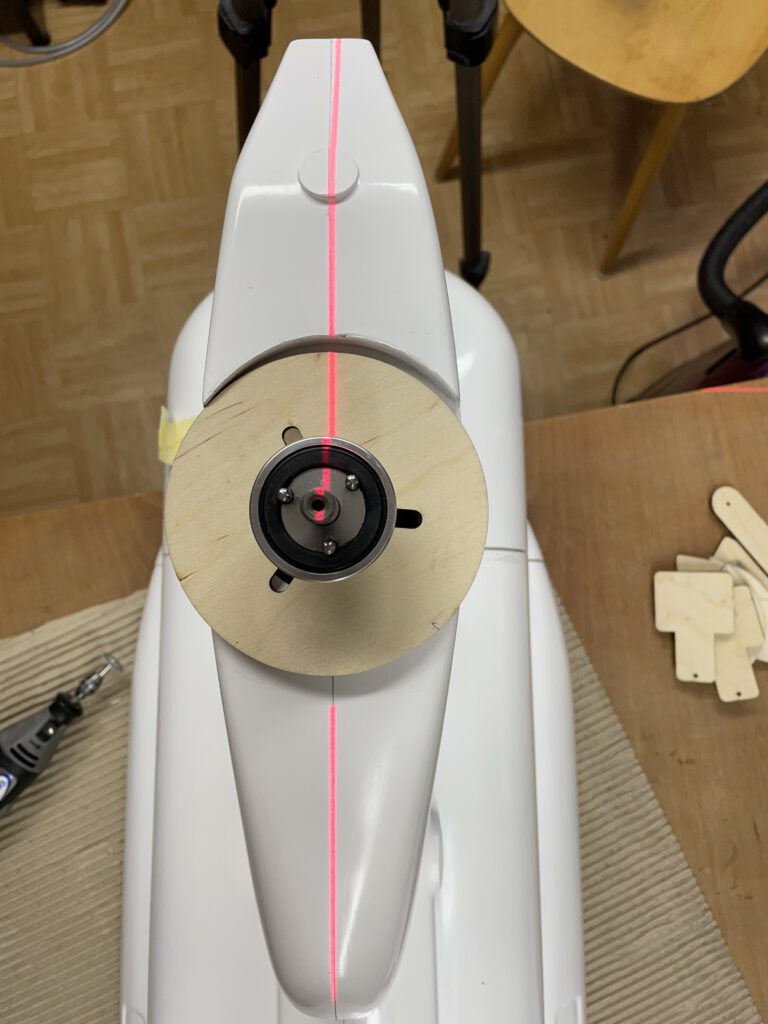
Zum anzeichnen der auszuschneidenden Öffnungen für die Rotorköpfe wurde kurzerhand eine Schablone mit dem 3D-Drucker erstellt.
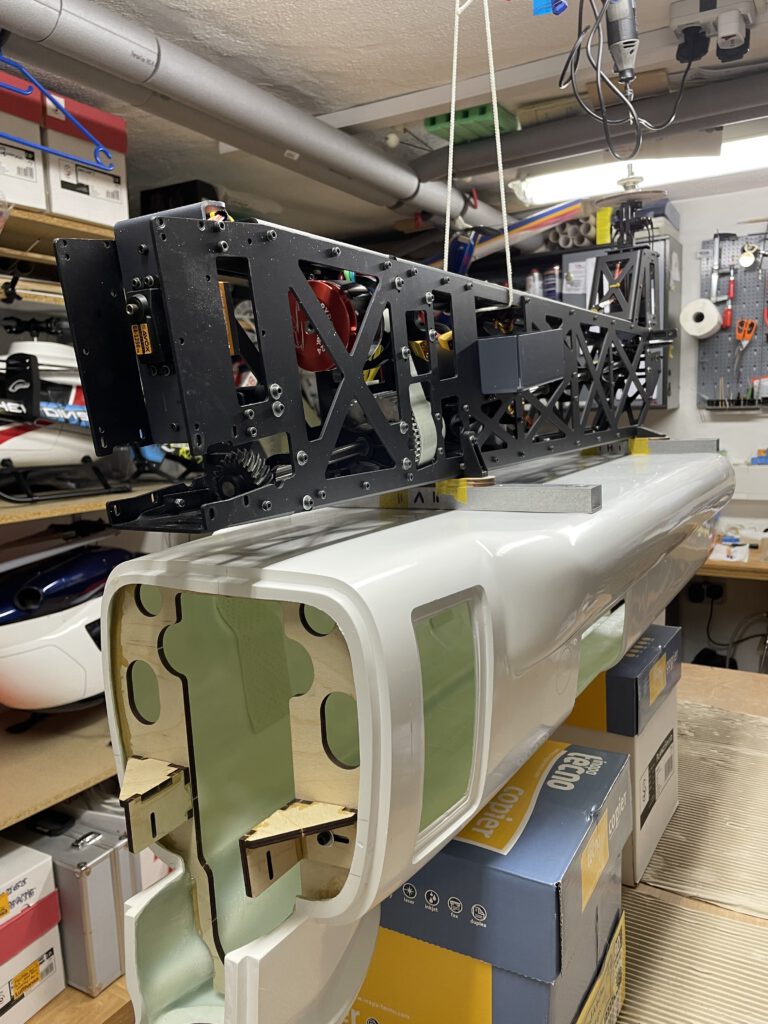
Im Bausatz lagen Holzscheiben bei, mit denen die Mechanik exakt im Rumpf und insbesondere auf die Öffnungen eingepasst werden konnten.

Nach dem ausrichten der Mechanik konnten der vordere Spant im Rumpf genau positioniert werden. Auch die Verbindungsplatten zwischen Mechanik und Rumpf im hinteren Bereich wurden ausgerichtet und eingeklebt.

Zum Schluss wurden noch die Öffnungen für das Fahrwerk gebohrt.



Nachdem nun das Modell erfolgreich mit eingebauter Mechanik geflogen ist, geht es jetzt im zweiten Teil des Bauberichtes an die Fertigstellung des Rumpfes den Zusammenbau und die Lackierung.
Wer gerne mitbauen möchte, findet hier den Link zur Bauanleitung auf der Homepage von VARIO Helicopter. 😉